# sync.Mutex是如何在底层实现锁状态的?
sync.Mutex 是如何在底层实现锁状态的?
# 简要回答
sync.Mutex 的锁状态浓缩在一个 32 位的 state 字段中。
Go 利用位运算,将第 0 位设为 Locked(加锁状态),第 1 位设为 Woken(唤醒状态),第 2 位设为 Starving(饥饿模式),高 29 位设为 WaiterCount(等待者数量)。
这种将多个状态压缩在一个变量中的设计,使得一次 CAS 原子指令就能同时完成状态检查和修改,避免了多字段带来的数据不一致问题,极大地提升了基础组件的性能。
# 详细回答
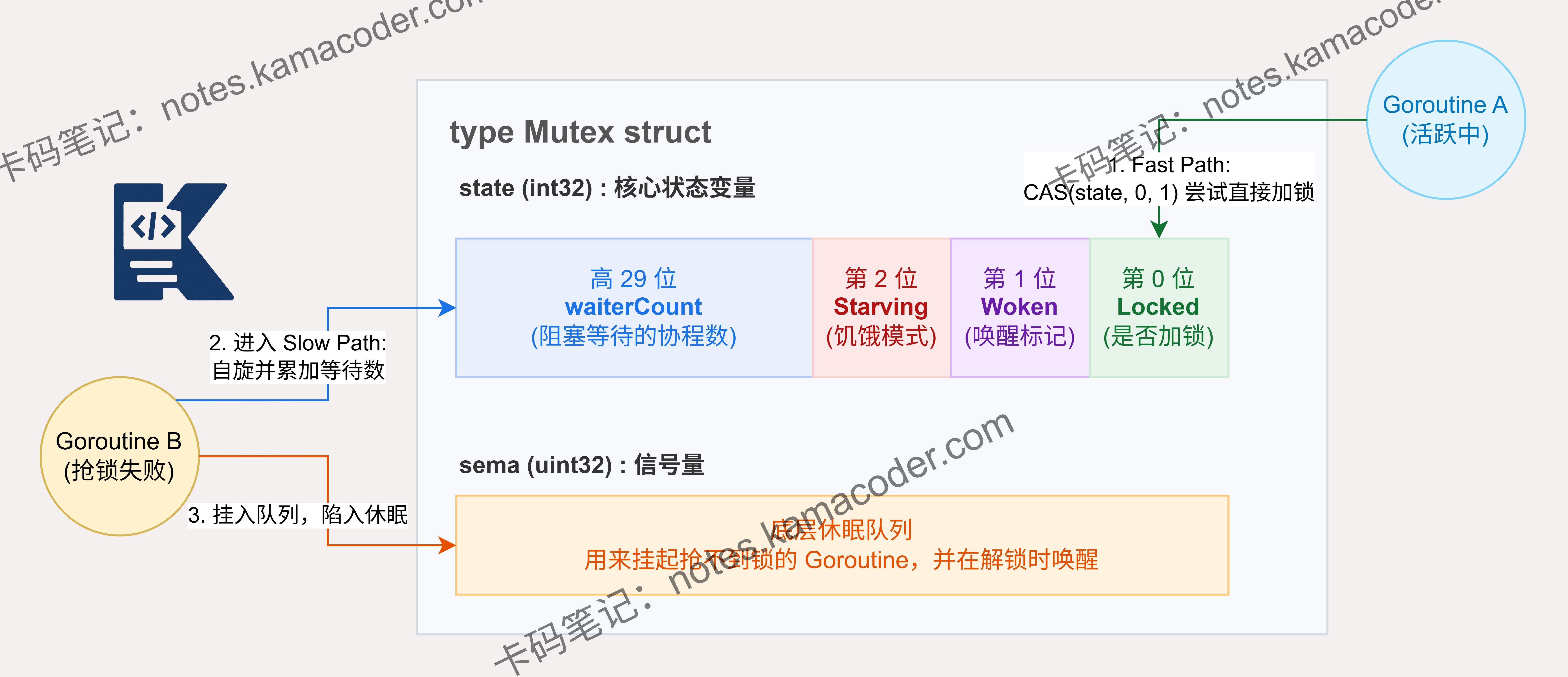
在底层数据结构上,sync.Mutex 只有两个字段:state int32 和 sema uint32。核心的锁状态全部记录在 state 这个 32 位整数中。具体来说:
- 第 0 位 (mutexLocked):值为 1 表示锁已经被某个 Goroutine 占用。
- 第 1 位 (mutexWoken):值为 1 表示有 Goroutine 已经被唤醒,主要是为了通知解锁的 Goroutine 不要再去唤醒其他等待者。
- 第 2 位 (mutexStarving):值为 1 表示锁进入了饥饿模式,这意味着锁的获取策略从竞争变为了严格排队,防止老的 Goroutine 饿死。
- 高 29 位 (waitersCount):记录当前阻塞等待该锁的 Goroutine 数量。
加锁时,如果 state 为 0,Goroutine 会直接通过原子操作 CAS 将第 0 位置为 1。如果已被占用,Goroutine 会进入 Slow path,可能进行自旋,或者调用底层的信号量机制将自己挂起。解锁时,同样通过 CAS 操作修改状态,并通过信号量唤醒等待队列中的 Goroutine。
# 知识图解
# 知识扩展
正常模式与饥饿模式的动态切换机制
Go 1.9 版本在 sync.Mutex 中引入了饥饿模式,以解决尾部延迟问题。
在正常模式下,等待者被唤醒后需要与新到达的 Goroutine 竞争,由于新来的 Goroutine 在 CPU 上运行且数量可能很多,唤醒的等待者往往会失败。 如果一个 Goroutine 等待时间超过 1 毫秒,它就会把 Mutex 的状态修改为饥饿模式。
在饥饿模式下,锁严格按照 FIFO(先进先出)排队,新来的 Goroutine 直接去排队。
当满足以下两个条件之一时,锁会恢复为正常模式:1. 当前获得锁的 Goroutine 等待时间小于 1 毫秒;2. 它是等待队列里的最后一个 Goroutine。这种设计兼顾了正常情况下的极高吞吐量与极端情况下的绝对公平。
# 面试官可能会追问
Q1: 为什么 sync.Mutex 不支持可重入?
A1:Go 官方明确反对在 Mutex 中加入重入机制。
如果 Mutex 是可重入的,某个 Goroutine 在持有锁期间调用了其他复杂函数,就很难追踪锁的释放时机,导致 Bug 难以排查。
遇到需要重入的场景,Go 推荐将需要保护的核心逻辑抽离成独立的无锁内部函数,由外部暴露的接口统一加锁调用。
Q2: Mutex 加锁过程中的自旋需要满足哪些条件?
A2: 自旋的核心逻辑是“盲等”,期望持有锁的 Goroutine 马上释放。
触发条件是:1. 锁处于正常模式(非饥饿);2. 运行在多核 CPU 且 GOMAXPROCS > 1;3. 至少有另一个 P 在工作;4. 自旋不超过 4 次。底层其实是调用了汇编级别的 procyield 指令,执行数十次空操作。
Q3: 如果一个 Goroutine 在持有锁的时候发生了 panic,会发生什么?
A3:如果发生 panic 时没有被 recover 捕获,整个程序会崩溃退出。
如果被捕获了,但没有在 defer 中释放锁,那么这把锁将永远处于 Locked 状态。
此时,所有正在等待这把锁的 Goroutine 都会永久阻塞,导致严重的 Goroutine 泄漏甚至死锁。
评论
验证登录状态...