# 并发读写一个普通的map为什么会panic?
并发读写一个普通的map为什么会panic?
# 简要回答
Go的普通map在并发读写时会触发panic,根本原因是Go运行时内置了并发冲突检测机制。
map结构体中有一个flags字段,写操作时会设置hashWriting标志位,其他goroutine读写时检测到该标志位被置位,就会直接调用throw抛出错误。
# 详细回答
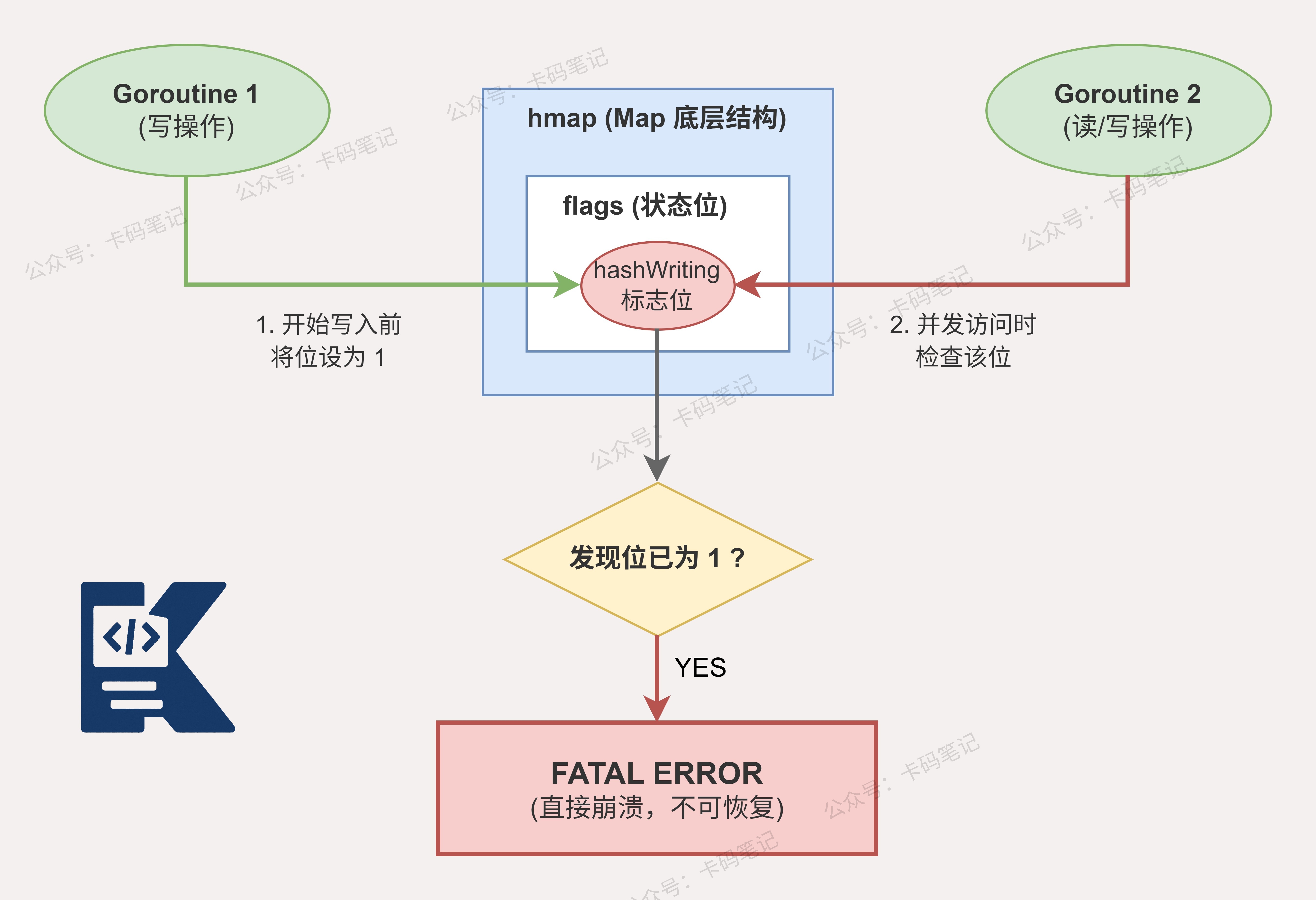
Go的map底层结构是runtime.hmap,其中包含一个flags uint8字段用于状态标记。
并发读写触发panic的核心机制分为以下几步:
- 写操作开始时,运行时会将
flags字段的hashWriting位设置为1,标记当前有写操作正在进行 - 读操作或其他写操作发起时,运行时会检查
hashWriting标志位是否被置位 - 一旦检测到冲突,运行时直接调用
throw函数,触发不可恢复的fatal error,即panic - 写操作完成后,运行时清除
hashWriting标志位,恢复正常状态
这种检测并非100%可靠,它依赖于时序,极端情况下可能漏检,但只要检测到就必然panic。
之所以设计成panic而非返回error,是因为数据竞争属于程序逻辑错误,应当在开发阶段暴露,而不是在生产环境中静默产生脏数据。
解决方案通常有两种:使用sync.Mutex或sync.RWMutex保护普通map,或者直接使用标准库提供的sync.Map。
# 知识图解
# 知识扩展
# 面试官可能会追问
Q1:sync.Map和加锁的普通map相比,性能优势体现在哪里?
A1:sync.Map内部采用了读写分离的设计,维护了一个read只读map和一个dirty读写map。
读操作优先访问readmap,无需加锁,通过原子操作完成,并发读性能极高。
写操作只操作dirtymap并加锁,当dirty中的数据被访问足够多次后,会被原子提升为readmap,实现以空间换时间。
因此sync.Map适合读多写少或key相对固定的场景,写多场景反而不如加锁的普通map。
Q2:除了sync.Map,还有哪些并发安全的map实现方案?
A2:第一种是分片锁map,将整个map拆分为N个分片,每个分片独立加锁,降低锁粒度,减少竞争,是高并发场景的常见优化手段。
第二种是channel串行化,所有读写操作通过一个goroutine串行处理,利用channel传递请求,天然避免竞争。
第三种是使用第三方库,如orcaman/concurrent-map,底层正是基于分片锁思想实现的高性能并发map。
实际项目中应根据读写比例和key数量选择最合适的方案。
Q3:Go的race detector能检测到map的并发问题吗?
A3:可以,但两者检测机制不同,覆盖范围也不同。
race detector通过-race编译标志启用,基于ThreadSanitizer实现,能检测所有类型的数据竞争,包括对普通变量、slice、map的并发读写,开销较大,通常只在测试环境使用。
map内置的hashWriting检测是运行时的轻量级检测,无需额外编译标志,但仅针对map操作,且存在漏检可能。
在实际使用中我们最好两种手段结合使用,开发测试阶段开启race detector,运行时依赖内置检测兜底。
评论
验证登录状态...